طراحی، ساخت و ارزیابی سامانه هوشمند تعیین بادبرئگی سمپاش
فی موو
مرجع دانلود فایل ,تحقیق , پروژه , پایان نامه , فایل فلش گوشیفی موو
مرجع دانلود فایل ,تحقیق , پروژه , پایان نامه , فایل فلش گوشیطراحی، ساخت و ارزیابی سامانه هوشمند تعیین بادبرئگی سمپاش
اختصاصی از فی موو طراحی، ساخت و ارزیابی سامانه هوشمند تعیین بادبرئگی سمپاش دانلود با لینک مستقیم و پر سرعت .
طراحی، ساخت و ارزیابی سامانه هوشمند تعیین بادبرئگی سمپاش
طراحی، ساخت و ارزیابی سامانه هوشمند تعیین بادبرئگی سمپاش
مزایا و مشکلات استفاده از تکنیک OFDM درسیستم رادیو هوشمند (COGNITIVE RADIO
اختصاصی از فی موو مزایا و مشکلات استفاده از تکنیک OFDM درسیستم رادیو هوشمند (COGNITIVE RADIO دانلود با لینک مستقیم و پر سرعت .

مزایا و مشکلات استفاده از تکنیک OFDM درسیستم رادیو هوشمند (COGNITIVE RADIO

qCognitive radio را میتوان به عنوان نمونه ای از مخابرات بی سیم که در آن یک شبکه یا یک نود بی سیم پارامترهای ارسال یا دریافت خود را تغییر می دهد تا از تداخل با استفاده کنندگان مجاز یا غیر مجاز جلوگیری شود، تعریف کرد. براساس این تعریف دو ویژگی اساسی برای این رادیو می توان در نظر گرفت:
vویژگی ناظر بر توانایی رادیو در بدست آوردن اطلاعات از محیط پیرامون خود می باشد که با استفاده از این ویژگی می تواند بخش هایی از باند فرکانسی را که در زمان ها و مکان های مشخص به صورت استفاده نکرده وجود دارند را شناسایی کرده و به دنبال آن بهترین پهنای باند و پارامتر های متناظر را مشخص کند.
vویژگی دیگر این توانایی را به رادیو می دهد که به صورت دینامیکی متناسب با تغییرات محیط اطراف برنامه ریزی شود و پارامتر های خود را تغییر دهد. به عبارت دیگر رادیو دارای توانایی برنامه ریزی شدن برای ارسال و دریافت در فرکانس های مختلف می باشد.
qدو ویژگی فوق رادیو را قادر می سازد که با توجه به تخصیص وسیع پهنای باند به استفاده کنندگان مختلف به صورت ثابت، از این باندهای فرکانسی به صورت مشترک با استفاده کنندگان مجاز استفاده کنند
مزایا و مشکلات استفاده از تکنیک OFDM درسیستم رادیو هوشمند (COGNITIVE RADIO
دانلود مقاله تنفس هوشمند
اختصاصی از فی موو دانلود مقاله تنفس هوشمند دانلود با لینک مستقیم و پر سرعت .
دانلود مقاله تنفس هوشمند
فن آوری سوپاپ متغیر تنفس نوینی به احتراق درونی داده است.
به احتمال بسیار مکش، تراکم، انفجار و تخلیه را به یاد می آورید. معمولأ توجه زیادی به تنفس موتور، اولین و آخرین از چهار زمان کارکرد موتور، می شود. بی هیچ تردیدی، از آنجایی که مشخصه های مکش و تخلیه در تولید قدرت نهایی موتور حیاتی و مهم هستند، صرفه جویی در مصرف سوخت و کاهش گازهای آلاینده اگزوز نیز بی اهمیت نمی باشند.
از ابتدا قصد داشتم که این مقاله بررسی خودروهایی باشد که از فن آوری سوپاپ متغیر بهره می برند، که بعد متوجه شدم اغلب مردم این روزها بی اطلاع از این فن آوری نیستند. علاوه بر این، اخیرأ از کنگره جهانی SAE 2007 برگشته ام و آنجا بود که مشخص شد فن آوری سوپاپ متغیر موضوعی داغ و به روز است. پس در عوض اجازه دهید مختصر و مفید تنفس موتور را یادآوری کنم و بعد برخی از پیشرفت های آن را که در حال تولید هستند، بررسی کنیم. در ادامه گزینشی از این فن آوری ها ارائه شده است. در نهایت به امکانات و احتمالات تولیدی آینده و مورد بحث در کنگره مذکور و جاهای دیگر می پردازیم.
اصول اولیه: سوپاپ ها و میل بادامک
حرکت رفت و برگشت سوپاپ ها در نتیجه تعامل آنها با یک محور به نام میل بادامک است که دارای برجستگی های بادامی شکل بر روی آن است. این تعامل ممکن است مستقیم در تماس با بادامک بوده و یا از طریق یک اسبک سوپاپ و یا ترکیبی از اسبک و میله رابط باشد. میل بادامک ممکن است در بالا و منفرد (SOHC) و یا جفتی (DOHC)، یا پایین در بلوک سیلندر (OHV) باشد. هر یک از این نمونه ها می توانند از طریق نیروی موتور توسط زنجیر، تسمه، و یا چرخ دنده به حرکت درآیند. در یک موتور چهار زمانه سرعت دوران میل لنگ نصف سرعت دوران میل بادامک در واحد زمانی دقیقه است.
میزان برآمدگی بادامک ها نقش تنفسی هر سوپاپ را تعیین می کند. بسته به سرعت میل لنگ، هر سوپاپ میزان خاص باز و بسته شدن خود را دارد. میزان زمانی باز بودن نیز محاسبه می شود. همچنین سوپاپ هوا و تخلیه نیز دارای زمان ویژه خود در مدت باز بودن همزمان می باشند. این میزانهای زمانی خاص نمی تواند برای هر موتوری صادق باشد. به میل سوپاپ یک ماشین مسابقه ای فکر کنید. با افزایش دور موتور، حتمأ مایلید سوپاپ ها زود تر و به حد کافی باز شوند و خطاهای مکش و تخلیه به حداقل برسد. با در نظر گرفتن تغییر فشار وارده بر موتور و دیگر عوامل متوجه خواهید شد که طراحی سوپاپ و میل بادامک یک مبارزه واقعی میان خودرو سازان است.
سوپاپ های متغیر
کاربرد سوپاپ های متغیر خطاها را کاهش می دهد. هر چه طراحی این گونه سوپاپ ها بهتر باشد، سوپاپ ها نیز بدون نقص کار خود را انجام می دهند. ساده ترین متغیرها عمر تولید کوتاهی دارند: آلفا رومئو 2 لیتری DOHC مدل 1980 قطعه ای در سوپاپ هوا خود دارد که در دورهای بالاتر از 1200 دور در دقیقه زمان باز بودن سوپاپ ها را بیشتر می کند. این میل بادامک و سوپاپ دو حالته آغاز راه بکارگیری سوپاپ متغیر بود.
تغییر وضعیت ها به طور مداوم بهتر از گسسته می باشد، و فقط کمی پیچیده تر است. این عملکرد عمومأ توسط نوعی توالی هیدرولیکی پولی حاصل می شود. در بعضی موارد وضعیت ها به طور الکتریکی کنترل می شوند که از مزایای آن رفع تأخیر زمانی فشار روغن موقع استارت موتور در هوای سرد است. به یاد داشته باشید که وضعیت های متغیر میل بادامک بازه های زمانی را تغییر نمی دهد و فقط اینکه یک یا دو بادامک متناسب با میزان دوران میل لنگ، بر میل سوپاپ ها فشاری متغیر وارد می کنند و اینگونه می تواند بر میزان گشتاور تأثیر گذاشته و نهایت دور موتور را افزایش دهد.
سیستم VTEC (کنترل الکترونیکی زمان در سوپاپ های متغیر) مربوط به هوندا آکورا اولین نمونه تولیدی بود و مثال خوبی برای اینگونه سیستم ها است. هر سوپاپ دو بادامک دارد و اسبک به دنبال هر برش بادامک است. پین موجود در اسبک مشخص می کند که کدام یک حرکت خود را به سوپاپ انتقال دهد. دو وضعیت کارکرد به طور بالقوه می تواند بازه های زمانی را تغییر دهد. حرکت میل بادامک می تواند با وضعیت آن ترکیب شود و در واقع تغییر وضعیت میل بادامک سیستم متفاوت i-VTEC (نمونه هوشمند) را به دنبال خواهد داشت.
همیشه چنین تغییرات وضعیتی فقط یک مقوله قدرتی نیست و اصول اقتصادی و صرفه جویی نیز مد نظر است. با سیستم VTEC-E {E مخفف Efficiency به معنی کارآیی) هوندا، کارآیی دورهای پایین موتور با کاهش دامنه یک سوپاپ از 4 سوپاپ یک سیلندر، تقویت می شود که به جریان سوخت و هوا شتاب داده و منجر به مخلوط بهتر این دو و احتراق پاک تری می شود. اختلاف ممکن و جابجایی در موقع نیاز نوع دیگری از موضوع تغییر وضعیت میل سوپاپ است. در صورت وجود فشار سبک بر موتور، سیستم i-VTEC V6 یکی از شش سیلندر را از کار می اندازد. بقیه نیز در صورت نیاز با غیر فعال کردن بادامک ها به طور هیدرولیکی از کار می افتند. در نهایت اینگونه است که تغییر وضعیتی میل سوپاپ به هوندا سیویک هیبریدی حالتی کاملا الکتریکی می دهد.
تغییر ممتد وضعیت میل بادامک
سیستم های مورد بررسی تا کنون 2 حالتی بوده اند. برای تغییر آنها به شکل عملکرد ممتد و مداوم، نیاز به قطعات بیشتر و هوش سازندگان دارد. چند سال پیش، فیات روش جالبی با برش مخروطی میل بادامک ارائه داد که با جلو عقب و رفتن، سوپاپ مورد نظر را باز یا بسته می کرد. کلیت این روش بعدأ توسط فراری توسعه داده شد. نقاط منفی آن در تولید، دقت و استهلاک بود. همچنین بر خلاف طرح های تغییر زمان و وضعیت میل بادامک، این روش باعث شد تا تمامی میل بادامک های متغیر به یک استراتژی واحد برسند.
هرچند با وجود عناصر سخت افزاری بیشتر، سیستم والوترونیک BMW نمودی از هنر مهندسان آن در عملکرد تغییر وضعیت ممتد میل بادامک بود. به همراه سیستم تغییر وضعیت VANOS هر دو سیستم به تغییر وضعیت ممتد در میل بادامک نائل شدند. سیستم والوترونیک یک اسبک دومی را بین هر بادامک و سوپاپ هوا قرار می دهد. در واقع در تعریف تنفس موتور، بسیار سیستم مؤثری است که BMW را از ساسات پروانه ای سنتی خلاص می کند که به نوبه خود مزیت کاهش فقدان فشار بنزین را به همراه دارد. به گفته این شرکت چنین سیستمی 10 درصد در مصرف سوخت صرفه جویی می کند. با معرفی در 316ti چهار سیلندر، سیستم والوترونیک به تدریج راه خود را در بسیاری از موتور های BMW پیدا کرد (حتی مدلهای جدید مینی). البته پیچیدگی آن (اسبک های چند تایی و لزومأ فنرهای قوی) کارآیی آن را در دورهای بالا محدود می کند.
همچنین سیستم نوین کنترل الکترونیکی تغییر زمانی سوپاپ ها متعلق به شرکت میتسوبیشی (به اختصارMIVEC) از اسبک های میانی برای سوپاپ های هوا استفاده می کند هر چند در تغییر وضعیت ممتد بکار نرفته است که دارای حالت های سرعت بالا و پایین است.
سیستم سوپاپ آئودی برای تغییر وضعیت سوپاپ در دو حالت، نیم نگاهی به میل بادامک های مورد استفاده در فیات و فراری دارد. بادامک های معمول و بلندتر بر روی یک میل بادامک زبانه دار می چرخند که هماهنگی آنها با پین های دقیقی در حلقه های فنری شکل تنظیم می شود.
تغییر پذیری برای الگوهای سنتی
حتی الگوی OHV نیز از فن آوری سوپاپ متغیر بهره می برد. به عنوان مثال، دوج وایپر جدید V10 تغییر وضعیت سوپاپ دود خود را مدیون یک جفت میل بادامک در بلوک سیلندر است. بادامک های میل سوپاپ بیرونی، سوپاپ های دود را از طریق بازوی اسبک ها تنظیم و بهینه می کند. بادامک های میل بادامک درونی نیز از طریق شکاف هایی سوپاپ های هوا را باز و بسته می کند. تغییر وضعیت سوپاپ دود با چرخش میل بادامک بیرونی به تناسب درونی به دست می آید. بدین شکل دلیلی برای تغییر پذیری سوپاپ هوا وجود ندارد و در نهایت اینکه وایپر به نیروی تورگ کمتری نیاز دارد. یک شرکت انگلیسی به نام مکادین اینترنشنال قطعات مورد نیاز این سیستم را تولید می کرد.
عملکرد بدون میل بادامک
استفاده الکترومغناطیسی از سوپاپ هوا و دود یکی از روش های عدم استفاده از میل بادامک است. در نوامبر 1998 شنیدم که سیستم الکترومکانیکی BMW در حال پیشرفت و نتیجه دادن است. 5 سال بعد در نوامبر 2003 پل فرر گفت که سری 3 بدون میل بادامک، سورپریز بعدی BMW خواهد بود؛ هر چند که محقق نشد. مسلمأ از مهندسی هوشمندی در دقت ساخت سوپاپ ها برخوردارند اما تاکنون از میل بادامک سنتی بهره برده اند.
اخیرأ شرکت قطعه سازی والئو اظهار داشته است که مشکلات پیچیدگی تولید و هزینه ها را حل کرده است. طبق آخرین اخبار، جدیدترین برنامه آنها طرح های بدون میل بادامک برای تولید در حدود سالهای 2010 یا 2011 است؛ هر چند که هنوز هیچ شرکت خودرو ساز طرف قرارداد مشخص نشده است. با سیستم سوپاپ هوشمند والئو، برای هر یک از سوپاپ ها یک تنظیم کننده ویژه با الکترومغناطیس های بالا و پایین و آرمیچری بین آنها وجود دارد. با فعال شدن مغناطیس بالا سوپاپ بسته می شود. با غیر فعال شدن آن و فعال شدن پایینی و به کمک فنرها، سوپاپ باز می شود.مغناطیس ها حرکت را در هر دو انتهای مسیر رفت و برگشت میل سوپاپ با دقت بالا تنظیم می کنند. هر یک از سوپاپ ها با عملکردی مستقل از بقیه، تحت کنترل مدیریت کامپیوتری موتور است. بنا به گفته های شرکت والئو، عملکرد بدون میل بادامک به میزان 25 درصد از نیروهای اصطکاکی و قدرت خور موتور می کاهد. همچنین با کنترل گزینشی سوپاپ های هوا و دود، نوآوری های بیشتری را در کل عملکرد موتور می توان اعمال کرد. به نظر می رسد که این فن آوری نو بتواند تا حدود 20 در صد در مصرف سوخت صرفه جویی کند و یا از گازهای آلاینده بکاهد. جالب اینکه با این سیستم مشکلات فشار هوا در دورهای بالای موتورهای فرمول وان نیز مرتفع می شود.
هوشمندی در فن آوری بدون میل بادامک
ایده عملکرد بدون میل بادامک بسیار تحریک کننده است! به عنوان نمونه ای از هوشمندی بالقوه آن، تنظیم دقیق و تمامأ کامپیوتری سوپاپ ها امیدی برای یک استارت برنامه ریزی شده است: در مقایسه با به حرکت درآوردن موتور با یک استارت سنتی (و سنگین)، کافی است تشخیص داده شود کدام سیلندر در وضعیت مکش قرار دارد، سوخت با جرقه همراه شده و پیستون از خواب بیدار می شود! با تکرار این روند در سیلندر های مناسب، موتور روشن می شود.
از کار انداختن گزینشی سیلندرها در زیر فشار سبک، یک موضوع نرم افزاری ساده می شود. همچنین کنترل متقارن چند سوپاپ هوا منجر به ایجاد حالت گردبادی در سوختن ترکیب هوا و بنزین می شود. اینچنین است که سوپاپ ها برای بهبود عملکرد خودشان می توانند بسیار هوشمند شوند.
مشخصات فنی پژو 206
موتور
مشخصات (مدل) تیپ 2 تیپ 3 تیپ 5 تیپ 6 (اتوماتیک)
موتور TU3A TU3JP/L4 TU3JP/L4 N6A (TU5) N6A (TU5)
تعداد سیلندر 4 سیلندر خطی
تعداد سوپاپها 8 16
حجم موتور 1400cc 1360cc 1587cc
نسبت تراکم 10.2/1 10.5
قدرت موتور 75 Hp at 5500 rpm 110 Hp at 5500 rpm
حداکثر گشتاور 118 Nm در 3400 دور در دقیقه 142 Nm در 4000 دور در دقیقه
سیستم انژکتوری چند نقطه ای با پاشش الکترونیکی
سوخت بنزین بدون سرب
سیستم احتراق احتراق داخلی (جرقه ای)
استاندارد حد آلایندگی یورو 4 یورو 3
سیستم سوخت انژکتوری
کارآیی
مشخصات (مدل) تیپ 2 تیپ 3 تیپ 5 تیپ 6 (اتوماتیک)
موتور TU3A TU3JP/L4 TU3JP/L4 N6A (TU5) N6A (TU5)
حداکثر سرعت 170 km/h 190 km/h
شتاب صفرتا 100کیلومتر 14/1 s 9/6 s 11/4 s
مصرف سوخت
مشخصات (مدل) تیپ 2 تیپ 3 تیپ 5 تیپ 6 (اتوماتیک)
موتور TU3A TU3JP/L4 TU3JP/L4 N6A (TU5) N6A (TU5)
میانگین مصرف خارج شهر 4/5 5.5 (Lit/100 km) 5.1 (Lit/100 km) 5.5 (Lit/100 km)
میانگین مصرف داخل شهر 9.4 (Lit/100km) 8.6 (Lit/100 km) 9.9 (Lit/100 km)
میانگین مصرف ترکیبی 9/6 7 (Lit/100km) 6.4 (Lit/100 km) 7.1 (Lit/100 km)
حدآلایندگی گاز مونوکسید کربن با وجود مبدل کاتالیزوری حدآلایندگی گاز مونوکسید کربن Euro II
سیستم انتقال قدرت
مشخصات (مدل) تیپ 2 تیپ 3 تیپ 5 تیپ 6 (اتوماتیک)
موتور TU3A TU3JP/L4 TU3JP/L4 N6A (TU5) N6A (TU5)
گیربکس (جعبه دنده ) (دستی) MA5N (دستی) AL4
کلاچ تک صفحه ای خشک - مکانیکی هیدرولیکی و الکترونیکی
دیفرانسیل دیفرانسیل جلو
ظرفیت ها
مشخصات (مدل) تیپ 2 تیپ 3 تیپ 5 تیپ 6 (اتوماتیک)
موتور TU3A TU3JP/L4 TU3JP/L4 N6A (TU5) N6A (TU5)
باک بنزین پلاستیکی(پلی اتیلن) 50 لیتر
حجم فضای صندوق عقب 245 Lit
روغن موتور (با فیلتر ) 3/2 Lit
روغن موتور بدون فیلتر 3 Lit
روغن گیربکس و دیفرانسیل 2 Lit
ظرفیت آب سیستم خنک کننده خودرو 6 Lit
روغن هیدرولیک فرمان 1 Lit
ترمزها
مشخصات (مدل) تیپ 2 تیپ 3 تیپ 5 تیپ 6 (اتوماتیک)
موتور TU3A TU3JP/L4 TU3JP/L4 N6A (TU5) N6A (TU5)
نوع ترمز ترمز هیدرولیکی ، دارای بوستر خلائی
نوع ترمز جلو دیسکی دیسکی با سیستم خنک کاری
نوع ترمز عقب کاسه ای دیسکی توپر
نوع ترمز ضد قفل ندارد 4 کانال با 4 سنسور - MK70 with EBD & EBA
تجهیزات الکترونیکی
مشخصات (مدل) تیپ 2 تیپ 3 تیپ 5 تیپ 6 (اتوماتیک)
موتور TU3A TU3JP/L4 TU3JP/L4 N6A (TU5) N6A (TU5)
نوع و توان باتری 6خانه ای (اسید سرب) - 50آمپر ساعت
ولتاژ 12ولت
سیستم شارژ دینام
دینام کلاس 7 کلاس 8
استارت کلاس 2 کلاس 3
واحد کنترل الکترونیکی S 2000 BOSCH
وزن
مشخصات (مدل) تیپ 2 تیپ 3 تیپ 5 تیپ 6 (اتوماتیک)
موتور TU3A TU3JP/L4 TU3JP/L4 N6A (TU5) N6A (TU5)
وزن تقریبی خودرو بدون سرنشین با مخزن سوخت پر وبدون تجهیزات اضافی 1025 Kg 1054 Kg 1096 Kg
حداکثر وزن قابل حمل توسط خودرو 2365 Kg 2467 Kg 2504 Kg
حداکثروزن مجاز با سرنشین 1450 Kg 1567 Kg
حداکثر بار بر محور عقب 780 Kg 780 Kg
حداکثر بار بر محور جلو 855 Kg
مالتی پلکس
مالتی پلکس در کم کردن حجم سیمها در خودرو نقش زیادی داشته است برای مثال درپژو206
محدودیتهای سیستم سیمکشی معمولی
در طی دو دهه گذشته پیچیدگی سیستمهای سیمکشی مدرن به طور پیوسته افزایش یافته
است و در سالهای اخیر این افزایش به شدت چشمگیر شده است اکنون کار به جایی رسیده
است که اندازه و وزن دسته سیم به مشکل مهمی تبدیل شده است تعداد سیمهای لازم در
مورد اتومبیلهای رده بالا حدود 1200 رشته می رسد دسته سیم لازم برای کنترل همه کارکردهایی
که به در سمت راننده مربوط می شود ممکن است تا 50 رشته سیم داشته باشد و سیستمهای
واقع در ناحیه داشبورد ممکن است به تنهایی بیش از 100 رشته سیم و اتصال داشته باشند
بنابراین اشکار است که گذشته از مشکل بدیهی اندازه و وزن دسته سیم با افزایش اتصالها و
سیمها احتمال بروز عیب هم بیشتر می شود تخمین زده می شود که هر 10 سال پیچیدگی
سیم کشی اتومبیل دو برابر می شود
تعداد سیستمهای که به صورت الکترونیکی کنترل می شود پیوسته رو به افزایش است هم اکنون
استفاده از بعضی از این سیستمها متداول شده است و استفاده از بعضی دیگر نیز رو به افزایش
است به عنوان نمونه چند تا از این سیستمها را نام می بریم
1- سیستم اداره موتور
2- سیستم ترمز قفل نشو
3- سیستم کنترل کشش
فرمت این مقاله به صورت Word و با قابلیت ویرایش میباشد
تعداد صفحات این مقاله32 صفحه
پس از پرداخت ، میتوانید مقاله را به صورت انلاین دانلود کنید
دانلود مقاله تنفس هوشمند
اسکریپت تبادل لینک هوشمند با PHP
اختصاصی از فی موو اسکریپت تبادل لینک هوشمند با PHP دانلود با لینک مستقیم و پر سرعت .

اسکریپت تبادل لینک هوشمند با PHP

سیستم تبادل لینک هوشمند "Linker"
- تبادل لینک خودکار و هوشمند
- اسکریپت PHP با پایگاه داده SQL
- امکان مدیریت بر لینک ها(ویرایش، حذف، بلاک، فالو/آنفالو)
- تشخیص خودکار لینکهای Follow
- فایل PDF آموزش نصب و پشتیبانی
- سورس کد کامل و مرتب
در این سیستم با کدام بخش های برنامه نویسی و طراحی وب می توانید آشنا شوید؟
- نحوه طراحی رابط کاربری ساده با HTML, CSS , jQuery , JavaScript
- نحوه ارتباط با دیتابیس، طراحی و ایجاد جداول و ذخیره و بازیابی رکوردها توسط دستورات SQL و کدهای PHP
- نحوه کار با فرم ها و ذخیره و بازیابی اطلاعات در PHP
- نحوه صفحه بندی اطلاعات بازخوانی شده از دیتابیس در PHP
- نحوه کار با AJAX در PHP با استفاده از جی کوئری و جاوا اسکریپت
- نحوه استفاده از JSON در سمت سرور با PHP ، و در سمت کاربر با jQuery
- ایجاد و پیاده سازی سیستم Login و کنترل حساب کاربری در PHP
- استفاده از Session در PHP
- توابع و روش های مربوط به تبادل لینک هوشمند
توضیح فایل ها:
فایلهای PHP
- Config.php : تنظیمات و مشخصات اولیه مربوط به سایت و ارتباط با دیتابیس.
- Install.php : نصب خودکار و ایجاد جداول مربوطه.
- Index.php : صفحه اصلی سیستم تبادل لینک، به همراه هدر، منو، ستون کناری و فرم تبادل لینک AJAX
- Linker.php : توابع مربوط به تبادل لینک، کنترل هوشمند لینک ها، ذخیره سازی و...
- Admin.php : صفحه مدیریت سیستم، رابط کاربری با فرمهایی جهت افزودن، ویرایش یا حذف لینک های خودکار و لینکهای ویژه. به همراه تنظیمات مختلف مربوطه...
- Read.php : توابع مختلف مربوط به صفحه مدیریت، لاگین و ارتباط با جداول جهت بازخوانی و ذخیره داده ها.
فایلهای جاوا اسکریپت
- ajax_functions.js : توابع جاوا اسکریپت و جی کوئری مختلف جهت کنترل ورودی فرمها، ذخیره و بازخوانی داده ها از دیتابیس.
- funcs.js : توابع مربوط به تبادل لینک به صورت AJAX
- script.js : توابع جی کوئری مربوط به رابط کاربری، منو و ستون کناری
فایلهای CSS
- Style.css
- FontAwesome.css
- Menu.css
- Admin-style.css
توابع مهم:
توابع اصلی Linker.php
- Linker() : تابع اصلی لینکر که با دریافت لینک و عنوان لینک، به بررسی امکان تبادل لینک می پردازد.
- Show_linkers() : این تابع برای بازخوانی اطلاعات جدولها و نمایش لینک سایت ها در صفحه اصلی به صورت صفحه بندی شده، استفاده شده است.
- Ch_dom() : تابع اصلی برای بررسی صحت تبادل لینک(صحت آدرس، عنوان، فالو یا آنفالو بودن لینک)
توابع اصلی read.php
- Add_linkers(): افزودن، ویرایش و حذف لینک های خودکار.
- Add_st(): برای تغییر، ویرایش و ذخیره تنظیمات سایت استفاده شده است.
- Show() : نمایش اطلاعات موجود در دیتابیس برای صفحه مدیریت سایت.(خروجی به صورت داده های html یا JSON )
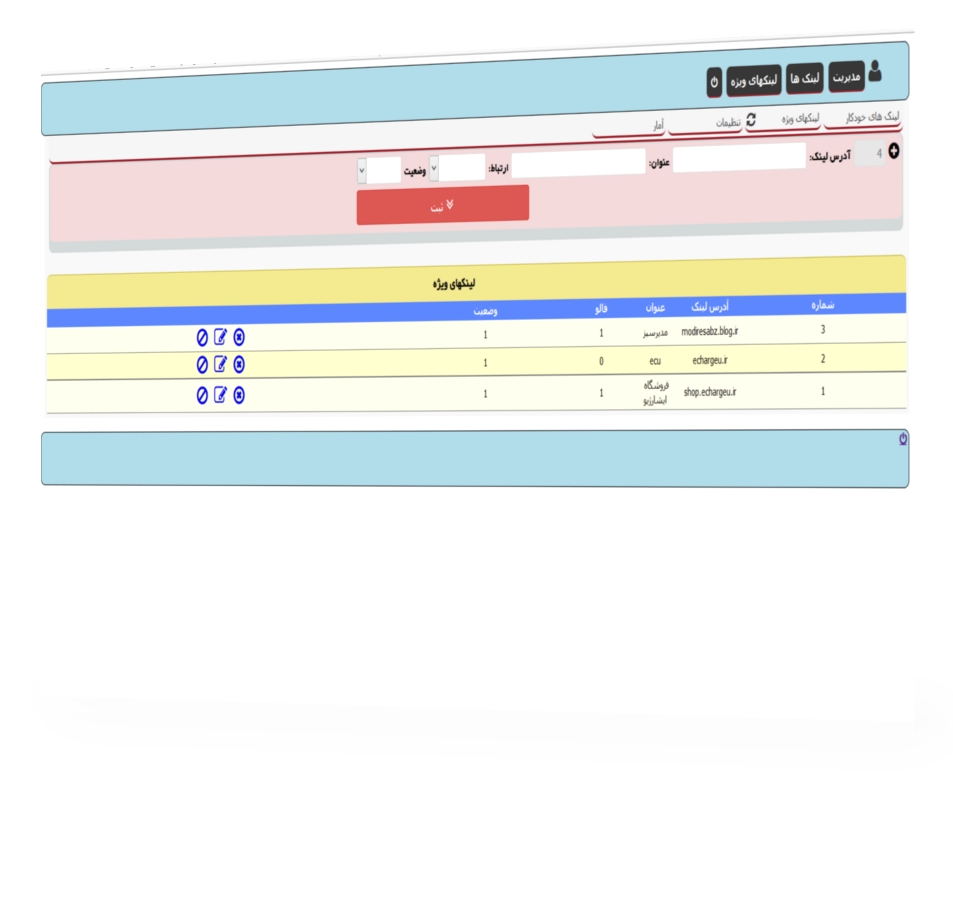
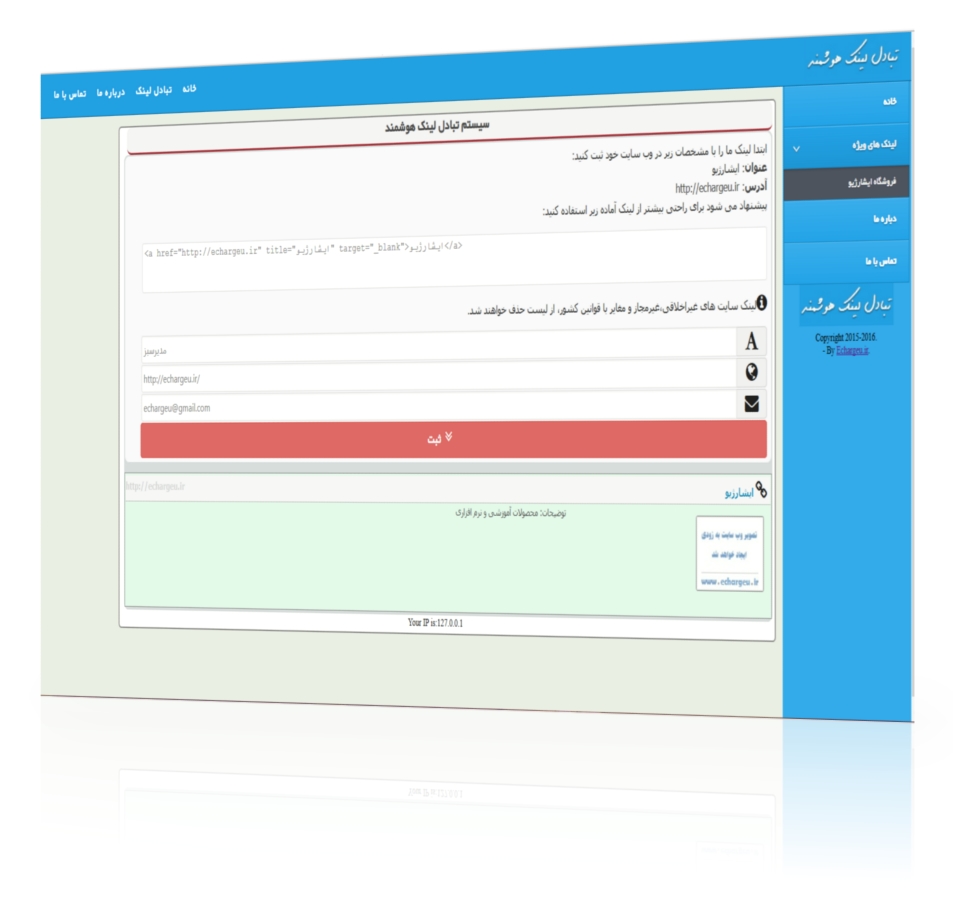

- در لینک دمو، تنها بخش تبادل لینک و فرم مربوط به آن با اندکی تغییر نمایش داده میشود.(سایر قسمت های مورد مشاهده شما، مانند ستون کناری، منوی بالایی و ... مربوط به اسکریپت نمی باشند.)
اسکریپت تبادل لینک هوشمند با PHP
پایان نامه بهینهسازی مسیر رباتهای هوشمند به کمک الگوریتم PSO
اختصاصی از فی موو پایان نامه بهینهسازی مسیر رباتهای هوشمند به کمک الگوریتم PSO دانلود با لینک مستقیم و پر سرعت .

پایان نامه بهینهسازی مسیر رباتهای هوشمند به کمک الگوریتم PSO

پایان نامه بهینهسازی مسیر رباتهای هوشمند به کمک الگوریتم PSO
63 صفحه در قالب word
چکیده
مساله مسیریابی روباتها یکی از پرکاربردترین مسائل مهندسی کنترل میباشد. هدف در این مساله یافتن مسیر به گونهای میباشد که با موانع برخوردی نداشته و مسیر کوتاهترین مسیر ممکن باشد. در سالهای اخیر روشهای مختلفی برای بهینهسازی معرفی شده و مورد استفاده قرار گرفتهاند. اغلب این روش ها منطبق بر جستجوی طبیعی و برگرفته از روش های موجود در طبیعت هستند. بهینهسازی یافتن بهترین جواب قابل قبول، با توجه به محدودیتها و نیازهای موجود در مساله است. هدف از بهینهسازی تعیین متغیرهای طراحی است، به گونهای که تابع هدف کمینه یا بیشینه شود. بنابرین مهمترین نکته در حل یک مساله انتخاب تابع هدف مناسب است که در مساله مسیریابی روبات عدم عبور از مانع و طول مسیر به عنوان اهداف مدنظر قرار میگیرند.
با پیشرفت در تکنولوژی و صنعت رایانه به ویژه در دهههای اخیر، نرم افزارهای متعددی بوجود آمدهاند که بهره برداری از روش های مختلف بهینهسازی را میسر میسازد. در این پایاننامه از الگوریتم ازدحام ذرات برای یافتن مسیر مناسب استفاده میشود سپس نشان داده میشود که با استفاده از الگوریتم ازدحام ذرات پرورشی میتوان به پاسخهای مناسبتری از جهت برخورد کمتر با موانع دست یافت.
فهرست
1-3- موضوع بهینهسازی و اهمیت آن. 3
1-4- بهینهسازی ازدحام ذرات.. 3
1-5- مروری بر سابقهمسیریابیرباتهای هوشمند. 4
مروری بر بهینهسازی ازدحام ذرات.. 9
2-1- تعریف بهینهسازی ازدحام ذرات.. 9
2-3- الگوریتم بهینه سازی ازدحام ذرات.. 11
2-3-2- مروری بر الگوریتم بهینهسازی ازدحام ذرات.. 12
2-3-3- مزایای بهینهسازی ازدحام ذرات نسبت به روشهای کلاسیک.. 15
2-3-4- مراحل پیاده سازی الگوریتم بهینهسازی ازدحام ذرات.. 16
2-3-5- برخی از نسخه های تغییر یافته بهینه سازی ازدحام ذرات.. 21
توضیح چند الگوریتم پرکاربرد. 29
3-1-2- ساختار الگوریتمهای ژنتیکی. 30
3-1-4- عملگر انتخاب (Selection ): 31
3-1-5- عملگر آمیزش (Crossover ): 32
3-1-6- عملگر جهش (Mutation ): 34
3-1-7- روند کلی الگوریتمهای ژنتیکی. 35
3-1-8- روند کلی بهینه سازی و حل مسائل در الگوریتم ژنتیک.. 36
3-1-10- برخی از کاربرد الگوریتمهای ژنتیکی. 37
3-2- الگوریتم بهینهسازی کلونی مورچه 38
3-2-1- بهینهسازی مسائل به روش کلونی مورچه (ACO) 39
3-2-2- مورچهها چگونه میتوانند کوتاهترین مسیر را پیدا کنند؟ 40
3-3- الگوریتم زنبور عسل(BA) 44
3-3-1- آیات قرآن در رابطه با زنبور عسل. 44
3-3-3- معرفی الگوریتم زنبور عسل. 46
3-3-4- برخی کاربرد های الگوریتم زنبور عسل در مهندسی. 46
3-3-5- مراحل الگوریتم زنبور عسل. 47
3-3-6- کاربرد الگوریتم زنبور عسل در مقالات.. 47
3-3-7- مزایای و معایب استفاده از الگوریتم زنبور عسل. 47
مسیر یابی ربات با استفاده از الگوریتم بهینهسازی ازدحام ذرات.. 49
4-1- روش های توصیف معادله منحنی مسیر 49
4-2- پروژه مسیریابی به روش تبدیل منحنی به خطهای بهم پیوسته و با استفاده از تکنیک PSO.. 49
4-2-1- تعریف پارامترهای اولیه. 49
4-2-2- محاسبه مسیر بهینه با تکنیک PSO.. 51
فصل اوّل
مقدمه
1-1- تعریف ربات
در حالت کلی ربات به ماشینی اطلاق میشود که بتواند تمام و یا قسمتی از کار یا عملی که بطور طبیعی توسط یک انسان انجام میشود را انجام دهد[1].
امروزه با پیشرفت تکنولوژی در زمینه اتوماسیون صنعتی و همچنین فضانوردی نیاز به رباتها بیش از پیش مورد توجه قرار گرفته است.حتی از رباتها و مسیریابی دقیق آنها در علوم پزشکی و حتی در بیمارستانها نیز برای رسیدگی مداوم مریض استفاده میشود.رباتها باید قادر باشند تا در محیط های گوناگون که غالبا غیر قابل پیش بینی نیز هستند و دارای موانع مختلف مثل صندلی،میز،دیوار،سنگ و... هستند،هوشمندانه عمل کنند وبدون برخورد به آنها، به وظایف مورد نظر رسیدگی کند.
شاید تفاسیری که از وظایف رباتهابازگوشد اغراق آمیز به نظر بیاید، ولی آنچه که در کشورهای پیشرفته در زمینه رباتها صورت گرفته است بسیار فراتر از موارد ذکر شده است. در کشوری مثل ژاپن به کمک رباتهایی که اصطلاحا انساننما گفته میشوند، در بعضی رستورانها و به عنوان خدمتکار مورد استفاده قرار میگیرند واینرباتها جدا از اینکه قادرند بدون هیچ اشتباهی غذا راتحویل مشتری دهند، این قدرت را نیز دارند که با مشتری صحبت و غذای مورد نظر مشتری را یادداشت نمایدوبدون شک این پیش پا افتاده ترین وظیفه رباتها در برابر هزاران دستورالعملی است که برای آنها درنظر گرفته میشود.
به عنوان مثال دیگر در کمپانی بنز آلمان، از رباتها در جوشکاری، برش و اتصالات داخلی خودرو وحتی آزمایشات کنترلی خودرواستفاده میشود که با وجود آنها هم هزینه برای کار فرما کاهش می یابد و هم از هر گونه خطای سهوی جلوگیری میشود.
پس با این مثالهایی که صورت گرفته است به نظر میرسد گفته بعضی از کارشناسان در مورد اینکه قرن بعد،قرن رباتهاست، زیاد هم عجیب نباشد.
1-2- تعریف مسیریابی
در میان مباحث مختلف مرتبط با رباتهای متحرک مساله مسیریابی از اهمیتخاصی برخوردار میباشد. هدف از این مسئله یافتنمسیری است که ربات را از نقطه شروع به نقطه پایان برساند و با موانع موجود در محیط برخورد نداشته باشد. این موضوع از دیدگاههای مختلفی میتواند مورد بررسی قرار گیرد، به عنوان مثال موانع موجود در محیط میتوانند ثابت و یا متحرک باشند. از دیدگاهدیگر بهینگی مسیر بدست آمده میتواند مورد بررسی قرار گیرد، معیار بهینگی با توجه به نوع مساله تعریف میشود، یافتنکوتاهترینمسیر ممکن، بدست آوردن مسیری که توسط ربات با حداکثر سرعت ممکن پیموده شود و یا ایجاد مسیری که حداکثر فاصله ممکن را از موانع داشته باشد، نمونههایی از معیارهای مختلف بهینهسازی میباشند.
1-3- موضوع بهینهسازی و اهمیت آن
در سالهای اخیر بهینهسازی جزء مهمترین مسائل پیش رو مهندسان، طراحان ومحققان بوده است. با گستردگی مسائل واهمّیت یافتن سرعت در پاسخ وهمچنین عدم کارآیی روشهای گذشته(کلاسیک)، بهینهسازی با الگوریتمهای هوشمند مورد استقبال بیشتری قرار گرفت.اغلب این روشها منطبق بر جستجوی طبیعی والهام گرفته از روشهای موجود در طبیعت میباشد.در این بین رشد قابل ملاحظه الگوریتمهایی نظیر الگوریتم بهینهسازی ازدحام ذرات[1]، الگوریتم وراثتی[2]، الگوریتم کلونی مورچه ها[3] و... غیرقابل انکار میباشد.
منظور از بهینهسازی که در قسمت قبل نیز اشاره شد،فرآیندی است که برای بهتر کردن چیزی دنبال میشود.فکر،ایدهوطرحی که توسط یک مهندس یا دانشمند مطرح میشود،طی فرآیند بهینهسازی بهبود و بهتر میشود.همچنین باید اشاره کرد که در طی فرآیند بهینهسازی باید کلیه شرایط تاثیرگذار بر روی پروژه، بطور کامل مد نظر گرفته شود.البته نباید فراموش شود که بهینهسازی ابزاری ریاضی است که برای یافتن پاسخ بسیاری از پرسشها در خصوص چگونگی راه حل مسائل مختلف بکار می رود که البته در این پروژه به کمک نرمافزار متلب، بهینهسازی صورت گرفته است.
1-4- بهینهسازی ازدحام ذرات
بهینهسازی ازدحام ذرات یکی از جدیدترین روشهای جستجو است که در چند سال اخیر مورد توجه دانشجویان ومهندسان قرار گرفته است و در این پروژه نیز بدلیل سادگی وهمچنین بهبود در عملکرد فرآیند بهینهسازی،مورد استفاده قرار گرفته است.
1-4-1- تاریخچه تحقیق
روش بهینهسازی ازدحام ذرات،عضوی از روشهای هوش جمعی است که در سال1995 میلادی اولین بار توسط کندی[4] و ابرهارت[5] با شبیهسازی رفتار اجتماعی پرندگان و ماهیها، به عنوان یک بهینهساز معرفی گردید[2].در ابتدا الگوریتمبهینه سازی ازدحام ذرات[6]به منظور کشف الگوهای حاکم بر پروازهمزمان پرندگان و تغییر ناگهانی مسیرآنهاوتغییرشکل بهینه دسته بکار گرفته شد[3]. برای برخی از حیوانات که بصورت گروهی زندگی میکنند از جمله دستههای ماهی(دستههای پرندگان)،رفتارهای پیچیدهای به هنگام حرکت قابل مشاهده هستند این در حالی است که هرکدام از اعضای جمع به اطلاعات محدودی دسترسی دارند وفقط از موقعیت عده اندکی از همسایگانشان خبر دارند.
روش بهینهسازی ازدحام ذرات یک الگوریتم جستجوی اجتماعی است واساس آن بر تکرار جستجو در محیط مسئله توسط جمعیت تصادفی میباشد که در هر تکرار، تابع شایستگی مورد ارزیابی قرار میگیرد وسپس بهترین موقعیت تمام پرندگان (کلیه ذرات موجود)درآن نسل در دوحافظه(بهترین موقعیت محلی،بهترین موقعیت کلی)قرار می گیرند.سپسدر نسل بعد جمعیت جدیدی جایگزین جمعیت قبلی میشوند.در واقع حرکت پرندگان در این الگوریتم به دو عامل حرکت فردی وحرکت جمعی وابسته است.همانطور که در فصول بعد نیز اشاره میشود؛ حرکت پرندگان(ذرات) به دو عامل وابسته است که یکی عامل موقعیت ودیگری عامل سرعت میباشد.الگوریتمبهینه سازی ازدحام ذراتذاتا یک الگوریتمپیوسته است. برای حل مسائل گسسته،نسخه باینری آن نیز ارائه شد که در چند سال اخیر این نوعبهینهسازی ازدحام ذرات،با ارائه روش نوین آن دارای عملکرد بهتری گشته است که در فصلهای بعد مزایای روش نوین باینری نسبت به روشهای سابق آن مورد بحث قرار خواهد گرفت.
1-5- مروری برسابقه مسیریابی رباتهای هوشمند
بنا به گفته اورلساهین1،از متخصصان معروف در زمینه رباتیک، تعداد زیادی استراتژی خاص برای مسیریابیرباتها در زمینههای مختلف رباتهای نقلیه ارائه شده است. بطور مثال فنگ وی ژینگ2،الگوریتمی برای هماهنگی بیشتر رباتهای هوشمند در زیر آب در جهت تراکم، آرایش گروهی بهترو ازدحام بهینهی رباتها ارائه داده است.
بهینهسازی ازدحام ذرات بوسیله ذرات تعریف شده در سیستم فضای مسئله ودر جهت یافتن جواب بهینه، شروع به جستجو می کنند وبا توجه به فرمولهای سرعت و مکان که قبلا اشاره شده است، جواب بهینه را مییابند. در هدایت یک ربات هوشمند، بمنظور رسیدن به مقصد نهایی،ربات باید از هرگونه برخورد با مانع و همچنین از خارج شدن محدوده مسئله جلوگیری کرد.در الگوریتممسیریابیرباتها باید به پارمترهایمکانی،تجسم موانع ونیز پیمودن مسیر حرکت بصورت پیوسته(از نقطه مبدا تا مقصد و بدون برخورد با موانع)توجه نمود.
آقای هاکر3 در مقالهای در زمینه استرتژی جدید مسیریابی، که در سال 2008 میلادی ارائه کرد، استفاده از ماتریس و مسیریابی بر اساس اشغال خانه های ماتریس (بمنظور شبیه سازی بهتر مسیر) مورد توجه قرار داد که در آن منظور از ماتریس همان محدوده مسالهو خانههای ماتریسی همان نقاط موجود در فضای مساله میباشد. لذا با این ایده میتوان برای کلیه نقاط موجود درون مساله، مختصات ویژهای در نظر گرفت و مکان لحظه به لحظه ربات را بخوبی مورد بررسی قرار داد. این نکته را نیز باید اشاره کرد که در دنیای حقیقی وجود موانع غیر قابل پیش بینی ملموس تر و دارای امکان پذیری بیشتر میباشد.البته آقای هاکر این ایده را در ارتباط با پروژه عملی دکتر راجا در( که سال 2011 .م در مقاله ای بیان شد) مورد محیطهای دینامیکی مسیریابی ربات ارائه داده بود.] 4 [
از مهندسان ایرانی نیز خانم مهندس احمدزاده و آقای قنواتی در سال 2012.م در مقالهای که ارائه دادند، توانستند به روش مناسبی بمنظور مسیر یابی بهینه رباتهای هوشمند در محیطهای غیرقابل پیشبینی دست یابند. این کار بوسیله وابستگی توابع محاسبه شده برای بهترین جمعی ومکانی (برای هر ذره) انجام شد. نتایج حاصله از این مقاله باعث اثراتی مثبت در مسیریابیرباتها درمحیطهای دینامیکی شد. [5]
قسمتی از تکنیکهای قدیمی در مسیریابی، مربوط به تکنیکهای هوشمند ذرات بوده است که در بسیاری از آنها تکنیک مورد نظر منحصرا بهینه سازی ازدحام ذراتبوده است. در همین راستا آقای کیانگژائو از مهندسان چینی ومتخصصین زمینه بهینهسازی ازدحام ذرات در مقاله علمی خود که درسال 2005 میلادی ارائه شد، بینظمی موجود در جستجوی محلی ذرات سیستم در بهینه سازی ازدحام ذراترا تعریف و روشی در بهبود بینظمی و همچنین سرعت همگرایی ارائه داد.دقیقا یک سال بعد از روش پیشنهادی آقای ژائو، آقای کاییو[7]، روشی مبنی بر اصلاح رویکرد بهینه سازی ازدحام ذراتدر مساله مسیریابی ارائه کرد که در آن هماهنگ شدن ذرات بهینه سازی ازدحام ذراتباعث جلوگیری از هرگونه مشکلی در جستجوهای سراسری ومحلی ذرات شد و این امر در تسریع سرعت همگرایی و رسیدن جواب بهینه بسیار سودمند بود.
اکثر روشهای موجود در مسیریابی، محیط در آن بصورت شناخته شده میباشد.گرچه در واقعیت محیطها غیر قابل پیش بینی هستند، ولی به کمک روشهای ساده و نیز تغییرات سادهدر برنامه کلی، می توان دید مناسبی نسبت به مسیر و موانع پیش رو داد.
در این پروژه با تعریف مساله در محیط ماتریسیوهمچنین در نظر گرفتن محدودیتهای مسیر، سعی شده است تا در محیط دوبعدی نرم افزار متلب، روند بهینه ی مسیر رباتهای هوشمند را با کمکبهینهسازی ازدحام ذرات بهبود بخشید.
هدف اصلی در مسیریابی، حرکت از مبدا به مقصد بدون برخورد با موانع میباشد.همچنین مسیر موجود باید حتما بهینه باشد.تعریف بهینه در مسیریابی همان کمینه کردن مسیر و به عبارتی دیگر، بهترین مسیر ممکن بری رسیدن به مقصد میباشد.پس رباتها بصورت یک گروه به کمک بهینهسازی ازدحام ذرات، شروع به جستجو مسیر برای رسیدن به مقصد می نماید.
پس با توجه به تعاریف صورت گرفته برای نوشتن یک مسیر صحیح برای رباتهای هوشمند باید قوانین زیر را مد نظر داشت:
- نقطه آغاز و پایان حرکت باید معین گردد.
- رباتها باید به مقصد نهایی حتما برسند.
- رباتها نباید از محدوده ماتریسی خارج شوند.
- در هنگام حرکت و در طول مسیر هیچ برخوردی با موانع صورت نگیرد.
- در صورت عبور از محدوده ماتریس برای رباتها قانون پنالتی منظور گردد. به عبارت دیگر تابع هزینه ای برای جریمه ی رباتها منظور گردد تا در صورت تخلف جریمه،و در صورت حرکت صحیح تشویق صورت گیرد.
یک طرح ساده مسیرمسئله باعث حرکت از نقطه ی آغازین به پایانی میشود.غالبا این طرحها در روش بهینهسازی ازدحام ذرات بصورت تصادفی ایجاد می شوند. بدین معنا که، می توان آرایه ای تصادفی از حرکت رباتها تولید وبدون در نظر گرفتن بهینهسازی و یا موانع موجود،طرح اولیه مسیر را به رباتهاداد.در مرحله بعد رباتها با پیروی از فرمانده، سعی به بهینهسازی مینمایند.در مسائل رباتیک منظور از فرمانده، ربات پیشرو نسبت به سایر رباتهامیباشد.
1-6- روشهای مسیریابی
روشهای مسیریابی رباتهای متحرک را میتوان به دو دسته کلی روشهای خارج خط و روی خط تقسیم نمود. در روش خارج خط (مسیریابی محلی) فرض بر آنست که شکل و موقعیتهندسی موانع موجود در محیط حرکت ربات مشخص است و بیشترروشهای خارج خط محیط حرکت ربات توسط یک گراف مدل میشود و سپس نقاط شروع و پایان حرکت ربات به این گراف افزوده میشوند، در گام بعد توسط روشهای کلی جستجوی گراف میتوان مسیربهینه را که نقطه شروع را به نقطه پایان متصل میکند بدست آورد و سپس مسیر بدست آمده در گراف را توسط روشهای موجود به محیط حرکت ربات منتقل نمود. در روش مسیریابی روی خط (مسیریابی سراسری)هیچگونهاطلاعاتی در مورد وضعیت جغرافیایی محیط،شکل و موقعیت موانع اطراف خود را بصورت محل شناسایی میکند[1]. به عبارتی مسیریابی سراسری بر اساس اطلاعات دریافتی از محیط در ابتدای جستجو میباشد ومسیریابی محلی بر اساس اطلاعات دریافتی از سنسورها در حین حرکت ربات در محیط واقعی میباشدکه در این کلاس سنسورها مانع از برخوردرباتها با موانع پیشرو میشوند.
الگوریتمهایی که به منظور هدایت ربات توسط روش روی خط مورد استفاده قرار میگیرند عبارتند از: روشهای فازی، الگورتیمهای ژنتیک، شبکههای عصبی و یا ترکیبی از روشهای مذکور، مزیت این روش آنست که هدایت ربات را در محیطهای ناشناخته از قبیل کرات فضایی و یا داخل لوله های نفتی که امکان تهیه نقشه کلی محیط وجود ندارد ممکن میسازد اما نقطه ضعف آنها را در مقایسه با روش های خارج خط کند بودن الگوریتم میباشد که این موضوع به دلیل زمان لازم جهت شناسایی محیط اطراف ربات میباشد .
بطور مثال در شکل (1-1)[6] ربات مسیر درست را تشخیص داده و هرچه تعداد برخورد کمتری با موانع داشته باشد، هوشمندتر است.
1-7- اهداف پروژه حاضر
در این پروژه با بکارگیری روش مبتنی بر یافتن نقاط شکست مسیر و الگوی بهینهسازی ازدحام ذرات سعی شده است تا مسیریابی رباتها به کمک نرم افزار متلب،بهینه ودر جهت بهبودمسیر آن گام بلندی برداشته شود.
1-8- مرور مختصر فصلها
درفصل دوم این پایان نامه بطور کامل کاربردهایبهینه سازی ازدحام ذراتپیوسته و همچنین مزایای آن نسبت به الگوریتم ژنتیک وسایرالگوریتمهای موجود بیان میگردند همچنین در فصل سوم به توضیح چند الگوریتم پر کاربرد دیگر پرداخته و در فصل چهارم ساختار کلی بهینه سازی ازدحام ذراتگسسته وروشهای جدید که درچند سال اخیر ابداع شده مورد بررسی قرار خواهند گرفت ودر انتها الگوریتم پروژه پایان نامه مطرح و مورد بحث و بررسی قرار میگیرد ارائه میگردد.
ممکن است هنگام انتقال از فایل ورد به داخل سایت بعضی متون به هم بریزد یا بعضی نمادها و اشکال درج نشود ولی در فایل دانلودی همه چیز مرتب و کامل است
متن کامل را می توانید در ادامه دانلود نمائید
چون فقط تکه هایی از متن برای نمونه در این صفحه درج شده است ولی در فایل دانلودی متن کامل همراه با تمام ضمائم (پیوست ها) با فرمت ورد word که قابل ویرایش و کپی کردن می باشند موجود است
پایان نامه بهینهسازی مسیر رباتهای هوشمند به کمک الگوریتم PSO